nathanstack15
-
Posts
74 -
Joined
-
Last visited
-
Days Won
1
nathanstack15's Achievements
")
Newbie (1/14)
3
Reputation
-
Hey y'all, Chris, a student at Cornell, wakes up at 8:59am for his 9:05 class. If the class is 1.5 km away, at what constant velocity does he need to travel in order to make it to class at 9:05? Neglect air resistance.
-
Let's Get the Most Out of Studying!
nathanstack15 commented on etracey99's blog entry in Home is Where Your Displacement is Zero
Ethan you're the man. Keep studying hard! -
You can do it Mady!
-
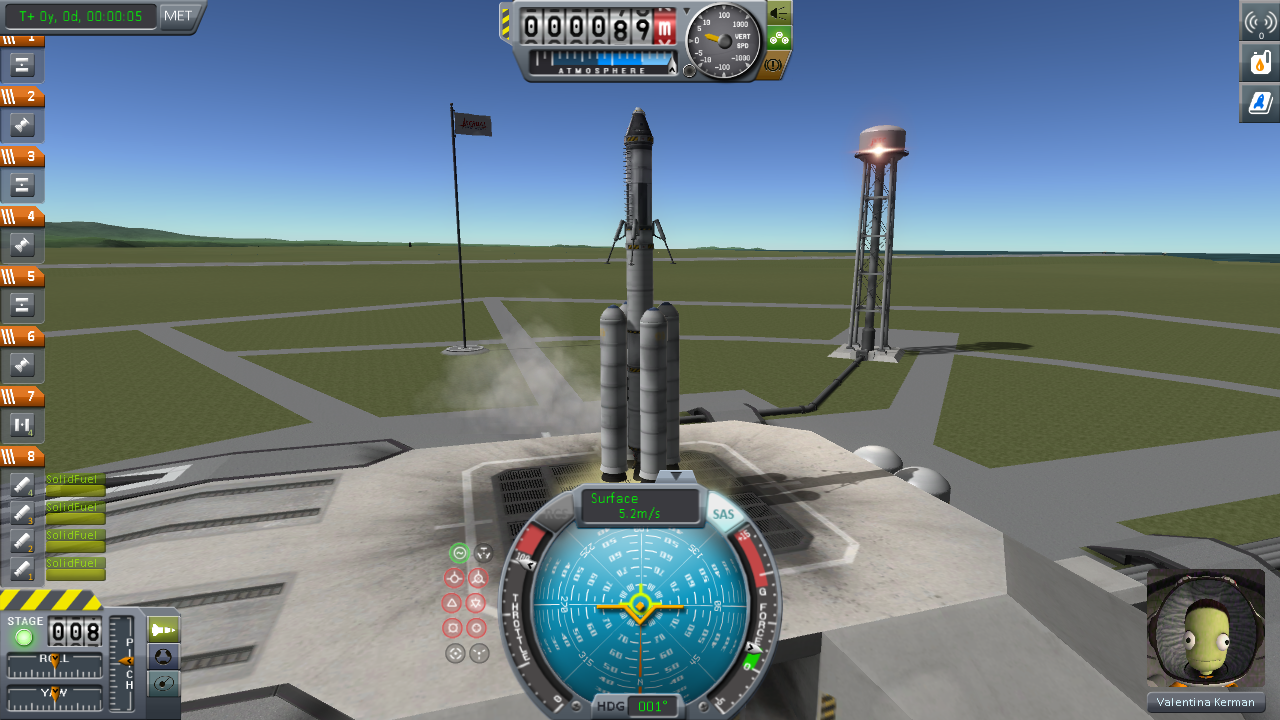
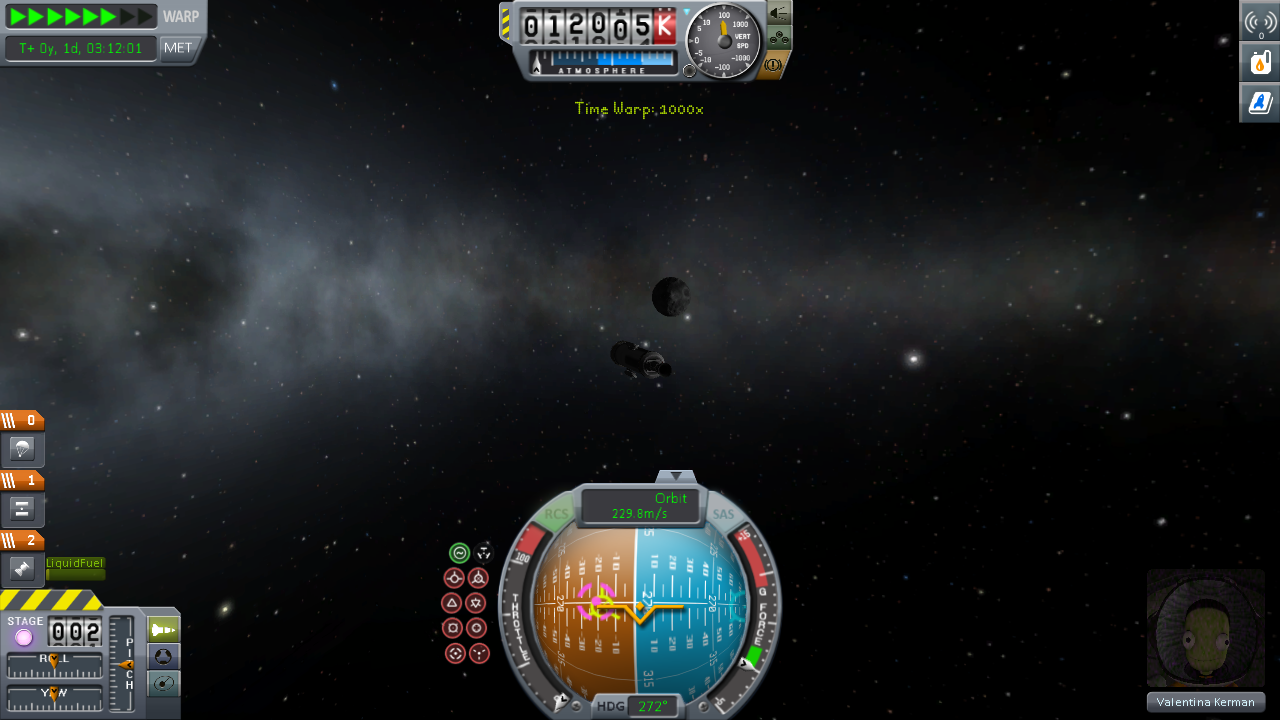
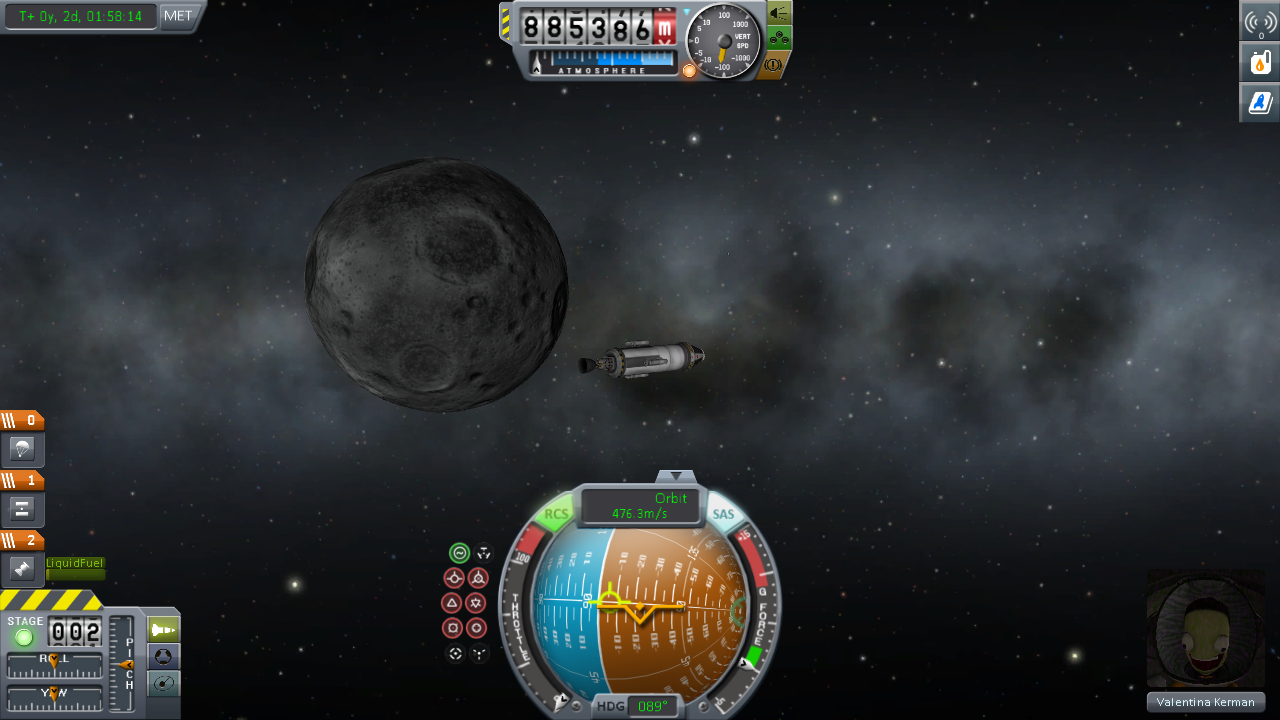
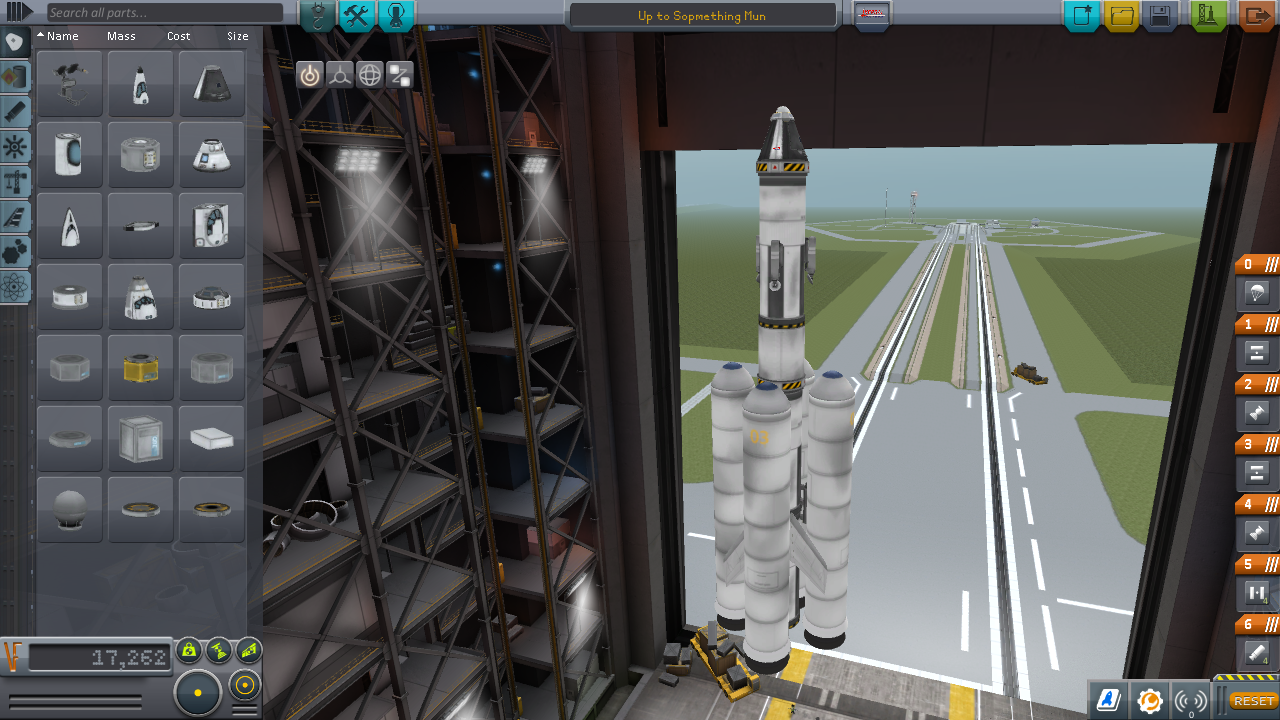
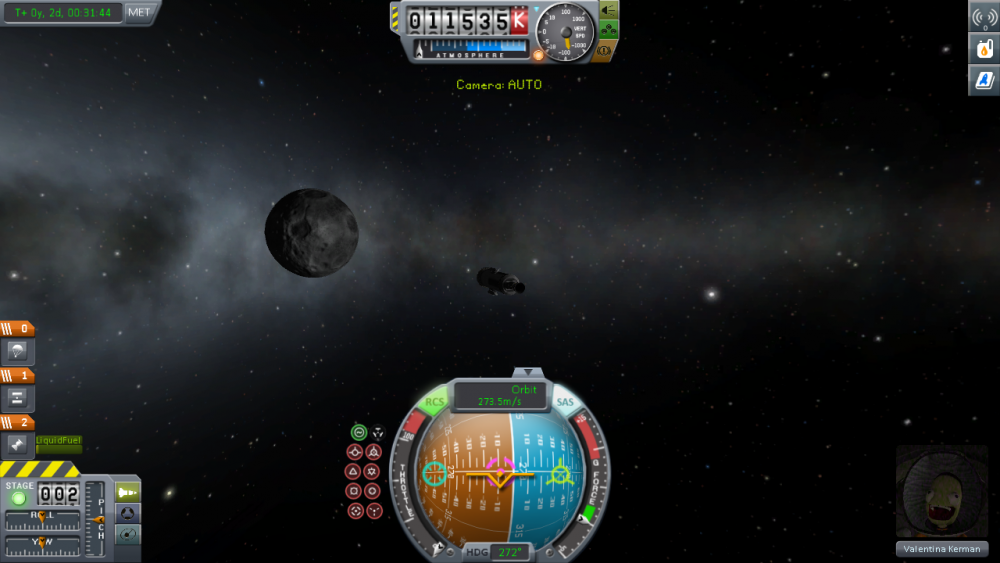
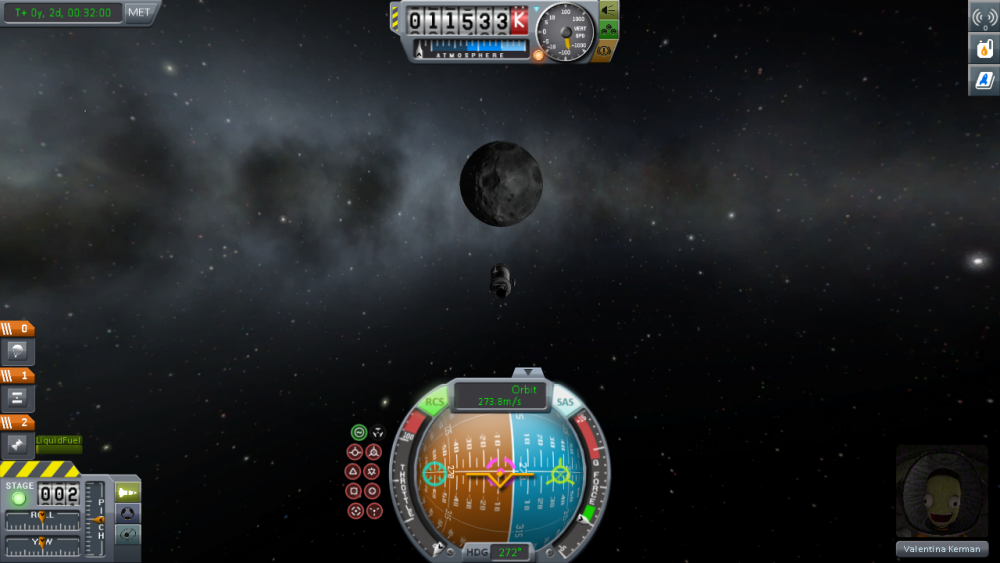
Pre-Launch Design Release Team Name: StackBNimble Corp. Available Funds: $299,018 Vehicle Name: Boi #2 Vehicle Parts List and Cost: Command Pod Mk 1: ($600) Parachute Mk16: ($422) 18A Stack Decoupler X2: ($800) Fuel Tank FL-T400 x3: ($1500) Swivel Liquid Fuel Engine x4: ($2400) Radiator Panels x2: ($300) Radial Decoupler TT-38K x4: ($2400) RT-10 Solid Fuel Booster x4: ($1600) Aerodynamic Nose Cone x4: ($960) Total: $17,262 Design Goals: Our vehicle is designed to possess maximum thrusting power in order to leave Kerbin's atmosphere, achieve stable orbit, and return safely to Kerbin. Launch Goal: In this launch, we hoped to achieve the following milestones: Orbiting Mun (+ safe return) - $200,000 Landing on Mun ( + safe return) - $250,000 Pilot Plan: We will use the SAS system to help us stay on track in getting into orbit. Our plan is to fly vertically upward, then rotate our rocket to about 65 degrees, then decouple our thruster when out of fuel. We will attempt to achieve a parabolic arc path. Once we have reached a certain altitude, we will accelerate to the horizon until stable orbit is achieved. Once orbit is achieved, we will calculate the angle at which we need to accelerate towards Mun and will attempt to land. When at the appropriate altitude, we will accelerate away from Mun's surface in order to land at a reasonably low velocity in order to make sure our rocket remains intact and that our pilot Bob stays safe. Illustrations: Launch Report and Debrief Launch Time: 10:31 A.M. Team Members Present: Chris VanKerkhove, Nathan Stack, Jeremy Walther Play-by-Play: The rocket left the launch path, accelerating vertically until an altitude of 120,000 km was achieved. At that point, our thruster was decoupled. We then angled towards the horizon, eventually rising to a level at which a parabolic arc path was achieved. We successfully exited Kerbin's atmosphere and accelerated towards the Mun. Once we got to Mun, we successfully orbited Mun, considering an attempt to land on Mun; however, the attempt was too dangerous as our fuel levels were too low. We then exited orbit by thrusting in the direction of Kerbin, our pilot ejected his parachute when at the appropriate altitude, and landed safely. We returned Bob Kerban safely to Kerbal. His family dearly missed him and they're happy he's home safe. Photographs: Time-of-Flight: 19 minutes. Summary: We achieved all of our desired milestones, indicated in the pre-launch debrief. Opportunities / Learnings: Our team learned of the importance of heat shields, as our rocket very nearly began to overheat. We also learned how to more successfully maneuver in order to achieve orbit, which has been a source of difficulty for us. Although we thought we had learned from previous launches to make sure that we had enough fuel to achieve our desired milestones, in this launch we did not. We need to more thoughtfully calculate how much fuel we will need in the future. Strategies / Project Timeline: Going forward, we recognize the need to experiment with different engines and command pods in order to try new things to achieve more difficult milestones. We also need to create a pilot plan in greater detail in order to more efficiently and effectively achieve our milestones. The pilot plan of this launch was better and had more detail than previous launches; however, the pilot plan can still be improved. Milestone Awards Presented: Orbiting Mun (+ safe return) - $200,000 Available Funds: $299,018 - $17,262 + $200,000 = $481,756












-
Pre-Launch Design Release Team Name: StackBNimble Corp. Available Funds: $50,000 Vehicle Name: Stud Vehicle Parts List and Cost: Command Pod Mk 1: ($600) Parachute Mk16: ($422) 18A Stack Decoupler X2: ($800) Fuel Tank FL-T400 x3: ($1500) Swivel Liquid Fuel Engine x2: ($2400) Radiator Panels x2: ($300) Radial Decoupler TT-38K x4: ($2400) RT-10 Solid Fuel Booster x4: ($1600) Aerodynamic Nose Cone x4: ($960) Total: $10,982 Design Goals: Our satellite is designed to possess maximum thrusting power in order to leave Kerbin's atmosphere and achieve stable orbit. Launch Goal: In this launch, we hoped to achieve the following milestones: First working satellite placed in stable orbit - $80,000 Pilot Plan: We will use the SAS system to help us stay on track in getting into orbit. Our plan is to fly vertically upward, then rotate our rocket to about 65 degrees, then decouple our thruster when out of fuel. We will attempt to achieve a parabolic arc path. Once we have reached a certain altitude, we will accelerate to the horizon until stable orbit is achieved. Illustrations: Launch Report and Debrief Launch Time: 10:38 A.M. Team Members Present: Chris VanKerkhove, Nathan Stack, Jeremy Walther Play-by-Play: The rocket left the launch path, accelerating vertically until an altitude of 80,000 km was achieved. At that point, our thruster was decoupled. We then angled towards the horizon, eventually rising to a level at which a parabolic arc path was achieved. We successfully achieved orbit. After achieving orbit, we attempted our first Kerbal EVA, which was successful. We then exited orbit by thrusting in the direction of Kerbin, and were worried as our pilot had to eject and deploy his parachute. He did land safely, however. Photographs: . Time-of-Flight: 14 minutes. Summary: We achieved all of our desired milestones, indicated in the pre-launch debrief. Opportunities / Learnings: Our team learned of the importance of heat shields, as our rocket very nearly began to overheat. We also learned how to more successfully maneuver in order to achieve orbit, which has been a source of difficulty for us. We also learned from previous launches to make sure that we had enough fuel to achieve our desired milestones, and we did. Strategies / Project Timeline: Going forward, we recognize the need to experiment with different engines and command pods in order to try new things to achieve more difficult milestones. We also need to create a pilot plan in greater detail in order to more efficiently and effectively achieve our milestones. Milestone Awards Presented: First working satellite placed in stable orbit - $80,000 Available Funds: $230,000 - $10,982 + $80,000 = $299,018
-
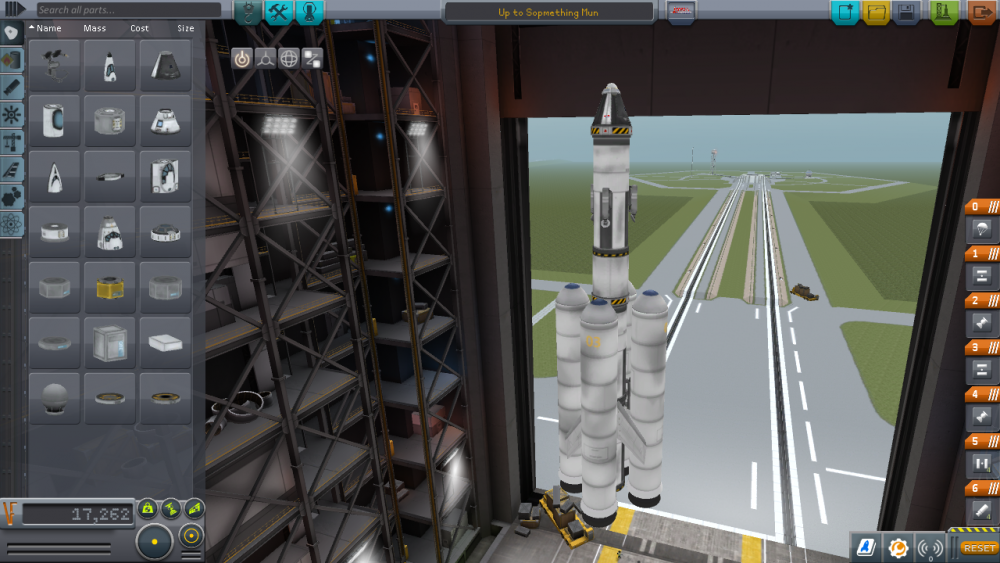
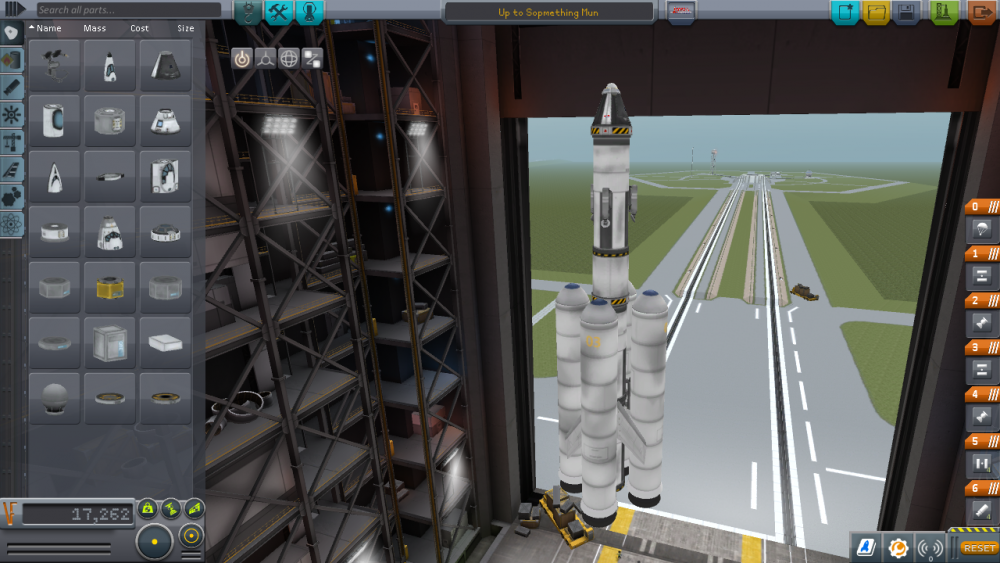
This launch was nearly identical to our third launch, except we remembered to take screenshots. Pre-Launch Design Release Team Name: StackBNimble Corp. Available Funds: $50,000 Vehicle Name: Boi #2 Vehicle Parts List and Cost: Command Pod Mk 1: ($600) Parachute Mk16: ($422) 18A Stack Decoupler X2: ($800) Fuel Tank FL-T400 x3: ($1500) Swivel Liquid Fuel Engine x2: ($2400) Radiator Panels x2: ($300) Radial Decoupler TT-38K x4: ($2400) RT-10 Solid Fuel Booster x4: ($1600) Aerodynamic Nose Cone x4: ($960) Total: $10,982 Design Goals: Our vehicle is designed to possess maximum thrusting power in order to leave Kerbin's atmosphere, achieve stable orbit, and return safely to Kerbin. Launch Goal: In this launch, we hoped to achieve the following milestones: Manned launch to 50 km - $30,000 Achieving stable orbit - $40,000 Achieving stable manned orbit - $50,000 Pilot Plan: We will use the SAS system to help us stay on track in getting into orbit. Our plan is to fly vertically upward, then rotate our rocket to about 65 degrees, then decouple our thruster when out of fuel. We will attempt to achieve a parabolic arc path. Once we have reached a certain altitude, we will accelerate to the horizon until stable orbit is achieved. Illustrations: This is our rocket: Launch Report and Debrief Launch Time: 10:21 A.M. Team Members Present: Chris VanKerkhove, Nathan Stack, Jeremy Walther Play-by-Play: The rocket left the launch path, accelerating vertically until an altitude of 80,000 km was achieved. At that point, our thruster was decoupled. We then angled towards the horizon, eventually rising to a level at which a parabolic arc path was achieved. We successfully achieved orbit. We then exited orbit by thrusting in the direction of Kerbin, and were worried as our pilot had to eject and deploy his parachute. He did land safely, however. Photographs: Time-of-Flight: 18 minutes. Summary: We achieved all of our desired milestones, indicated in the pre-launch debrief. Opportunities / Learnings: Our team learned of the importance of heat shields, as our rocket very nearly began to overheat. We also learned the importance of making sure we have ample fuel to achieve our desired milestone; we ran low on fuel near the end of the launch. Had we ran out of fuel, we may have been unable to return to Kerbin's surface. Strategies / Project Timeline: Going forward, we recognize the need to experiment with different engines and command pods in order to try new things to achieve more difficult milestones. We also need to create a pilot plan in greater detail in order to more efficiently and effectively achieve our milestones. More than anything, we need to continue gaining experience in KSP, as it is a very new game to all of us, and learn all of the little tricks of the game in order to truly succeed. Milestone Awards Presented: Manned launch to 50 km - $30,000 Achieving stable orbit - $40,000 Achieving stable manned orbit - $50,000
-
This past Friday at Arts Fest, we brought Kerbal Space Program into the real world. Every year at Arts Fest, the Physics 1 students are given a project in which they need to construct a rocket out of a 2 Liter bottle, which is then launched on the track. If the rocket is in the air for at least 7 seconds, full points are awarded. This year, Mr. Fullerton gave all of his Physics C students the same project. If our rocket remained in the air for at least 7 seconds, then our reward would be 100,000 kerbency for our team in Kerbal Space Program. Our team, Stack B Nimble Corp., received the full reward. Our rocket remained in the air for 8.23 seconds, a better time than we expected.
-
Pre-Launch Design Release Team Name: StackBNimble Corp. Available Funds: $50,000 Vehicle Name: Boi Vehicle Parts List and Cost: Command Pod Mk 1: ($600) Parachute Mk16: ($422) 18A Stack Decoupler X2: ($800) Fuel Tank FL-T400 x3: ($1500) Swivel Liquid Fuel Engine x2: ($2400) Radiator Panels x2: ($300) Radial Decoupler TT-38K x4: ($2400) RT-10 Solid Fuel Booster x4: ($1600) Aerodynamic Nose Cone x4: ($960) Total: $10,982 Design Goals: Our vehicle is designed to possess maximum thrusting power in order to leave Kerbin's atmosphere, achieve stable orbit, and successfully achieve our first Kerbal EVA after orbit is established. Launch Goal: In this launch, we hoped to achieve the following milestones: Manned launch to 50 km - $30,000 Achieving stable orbit - $40,000 Achieving stable manned orbit - $50,000 First Kerbal EVA - $60,000 Pilot Plan: We will use the SAS system to help us stay on track in getting into orbit. Our plan is to fly vertically upward, then rotate our rocket to about 65 degrees, then decouple our thruster when out of fuel. We will attempt to achieve a parabolic arc path. Once we have reached a certain altitude, we will accelerate to the horizon until stable orbit is achieved. Illustrations: We forgot to take screenshots of our rocket and during our flight. Launch Report and Debrief Launch Time: 10:21 A.M. Team Members Present: Chris VanKerkhove, Nathan Stack, Jeremy Walther Play-by-Play: The rocket left the launch path, accelerating vertically until an altitude of 80,000 km was achieved. At that point, our thruster was decoupled. We then angled towards the horizon, eventually rising to a level at which a parabolic arc path was achieved. We successfully achieved orbit. After achieving orbit, we attempted our first Kerbal EVA, which was successful. We then exited orbit by thrusting in the direction of Kerbin, and were worried as our pilot had to eject and deploy his parachute. He did land safely, however. Photographs: We failed to take screenshots.. Time-of-Flight: 14 minutes. Summary: We achieved all of our desired milestones, indicated in the pre-launch debriedf. Opportunities / Learnings: Our team learned of the importance of heat shields, as our rocket very nearly began to overheat. Strategies / Project Timeline: Going forward, we recognize the need to experiment with different engines and command pods in order to try new things to achieve more difficult milestones. We also need to create a pilot plan in greater detail in order to more efficiently and effectively achieve our milestones. Milestone Awards Presented: Manned launch to 50 km - $30,000 Achieving stable orbit - $40,000 Achieving stable manned orbit - $50,000 First Kerbal EVA - $60,000 Available Funds: $50,000 + $30,000 + $40,000 + $50,000 + $60,000 = $230,000
-
I've never heard of Cherenkov Radiation before. Very cool!
-
Looks painful!
-
The World's First Quad Cork 1800
nathanstack15 posted a blog entry in Physics C and How it Relates to Me
A couple days ago, a Swiss skier named Andri Ragettli landed the first ever 'Quad Cork 1800', in which he flew 38 yards off of a jump in Italy, making five full rotations and four head-under-body spins. The video of the jump is attached below. The true difficulty of landing such a trick is very clear when considering the physics behind it. First, in order to be in the air long enough to perform such a trick, a skier needs to gain a great amount of kinetic energy as he descends from the top of the hill. In order to do this, the height of the top of the hill should be maximized so as to maximize gravitational potential energy, which is then converted into kinetic energy as the skier descends. Additionally, once Ragettli is in the air, you may notice that he crouches down low, which minimizes the rotational inertia of his body, allowing him to experience a more rapid angular acceleration. After Ragettli rotates multiple times in mid air, just before landing, he straightens his body, which increases his rotational inertia. Since angular momentum is conserved, an increasing rotational inertia causes a decreasing angular speed. Therefore, by straightening his body, his angular speed decreases, making it easier to stick the landing. -
I have played the saxophone for a very long time and really enjoy it. Although I have played it for so long, I have never learned the physics behind how blowing on a little piece of wood generates sound. In making a sound on the saxophone, one blows air at a high pressure through the mouthpiece. The reed controls the air flow through the instrument and acts like an oscillating valve. The reed, in cooperation with the resonances in the air in the instrument, produces an oscillating component of both flow and pressure. Once the air vibrates, some of the energy is radiated as sound out of the bell and any open holes. A much greater amount of energy is lost as a sort of friction with the wall. The column of air in the saxophone vibrates much more easily at some frequencies than at others. These resonances largely determine the playing frequency and thus the pitch, and the player in effect chooses the desired resonances by suitable combinations of keys. Also, the saxophone acts as a closed end resonator, and, more simply, a conical pipe. The natural vibrations in the saxophone that cause it to play notes are standing waves. The standing waves in a cone of length L have wavelengths of 2L, L, 2L/3, L/2, 2L/5... in other words 2L/n, where n is a whole number. The wave with wavelength 2L is the fundamental, that with 2L/2 is called the second harmonic, and that with 2L/n the nth harmonic. The frequency equals the wave speed divided by the wavelength, so this longest wave corresponds to the lowest note on the instrument: Ab on a Bb saxophone, Db on an Eb saxophone. For a more complete overview, visit the University of South Wales website on acoustics: https://newt.phys.unsw.edu.au/jw/saxacoustics.html#overview
-
Recently in my BC Calc class, we've been talking about series and in some cases the application of them. The harmonic series is especially applicable to music: in music, strings of the same material, diameter, and tension whose lengths form a harmonic series produce harmonic tones. Another application of the harmonic series is the Leaning Tire of Lire, a theoretical structure. Suppose that an unlimited identical books are stacked on the edge of a table in such a way that the maximize the overhang. In order to maximize overhang but prevent the structure from collapsing, we can apply the formula for calculating center of mass: c= (x1M1 + x2M2) / (M1+M2). In order to maximize the overhang, we need to stack the books in a way such that their center of gravity remains at x=0. This prevents the weight of the stack from applying a torque to the stack, which would result in an angular acceleration and the toppling of our structure. If we consider the center of mass of the stack with n+1 books, we get the following: The length of the overhang, therefore, can be modeled by the harmonic series, . Theoretically, the harmonic series will balance with an infinite number of books. It takes 31 books for the overhang to be two books long, 227 books for the overhand to be 3 books long, and over 272 million books for the overhang to be 10 books long. Crazy stuff.
-
The physics behind touch screens
nathanstack15 commented on NathanKenney's blog entry in So, I guess I signed up for another year of ap physics...
That's so cool, that touch screens act like capacitors -
Skimpy